This is part 2, i suggest you start to read part 1 if you have not done so already.
When a i start a new design, i prefer to make the parts as a "bare minimum" for the functionality i need. This is because its easier to get a "feeling" for how much the part will flex and check if it is out of proportion to the rest of the design. I have lost count of how many times i have gotten a part from the CNC mill or 3d printer that looks and feels much bigger or smaller then i expected from the design.

Here is my first sled/linear rail design. It was made just to test that the design worked and did not lock on the rail. As it turned out, it behaved very well. but the first part was 2mm to high so the two RC shock absorbers could not be mounted in the middle. What you see in the image above is the second design.
I detected that sometimes when a spring got contracted too much it got stuck (as seen on the lower spring). The design did not take any consideration to how the middle sled would be driven. Initially i planned to use a screw rod, but i needed to have the springs in the middle, otherwise i would have to add more springs or the design would become unbalanced. I planned to add a "fork" that pushed on the middle point, but this felt a bit complex.
Then i thought i would try to make it pully driven, so I added a motor mount and designed a pulley/roller system for a wire to be installed so i could push and pull on the middle part of the sled.
Then i made this video to show how it worked:
Here is the initial prototype as well as the pully driven system:

But after playing around a bit with the motor i got some slippage between the pully and wire and...

It melted and the pulley have not been found to this day. Lesson learned, its hard to get the tension right. If its to tightened it will be hard to drive and it might compress one side of the linear rail making it unaligned. If it is too lose then it will slipp and burn. The pulley based system was also backdrivable, not something i want for my application. I still think this is a feasible design with some more tuning. It will definitely be cheaper and more lightweight.

I really like how the third design (to the right) turned out, it looks really awesome, i feel a little sad that i won't be part of my next design.

When the first design failed, i started to look at 3d printing a gear box to get lower speed and more torque. I managed to get a gearbox with a lot of backlash to work on the third try with a lot of manual cleaning/tuning. Again I got the feeling that i was making things more complicated then needed.
So i went back to my original idea and made it driven by a screw rod.

I also decided to try to make a 3d printed spring/dampener. I print in ABS and its not very suitable to build a spring of. It is only able to handly slight deformations before it becomes damaged.

The piece above is an old print that i bent ~20 degrees before it began to crack in the middle.
But i decided to give it a shoot again, and yet again i got something that worked on my third try.

I then incorporated this in a modular design. The new design works very well and the spring behaves better then expected. It is not very good at storing energy, but i will definitely be able to detect collisions and to some degree how big the impact is.
A big reason why i wanted to 3d print a spring is to be able to autogenerate spring designs for whatever application you might want to use a SEA for.

I also looked into using the springs from the RC shock absorbers in a custom design, and the prototype below worked very well, I will continue on this design path as well.
Again, this design have many flaws and are made just for me to get a feeling for the relative scale and interaction between parts.

I actually have a third design path to explore for the dampening. lets use "artificial muscles/nylon muscles". They are easy to make and dirt cheap, and you can quite easily control how "springie" the end product shall be. But it will yet again be hard to get the tension / springiness correct.

Here are two designs for adapters between my 3.17mm motor shaft and M4 screw rod. I think i prefer the "clamp" design instead of a "screw press on axis" design, as the threads will be worn out after a while and then everything will come loose. On the other hand, in the clamp design, the nut will probably come loose after a while, so lets call it a draw and select the most elegant solution.

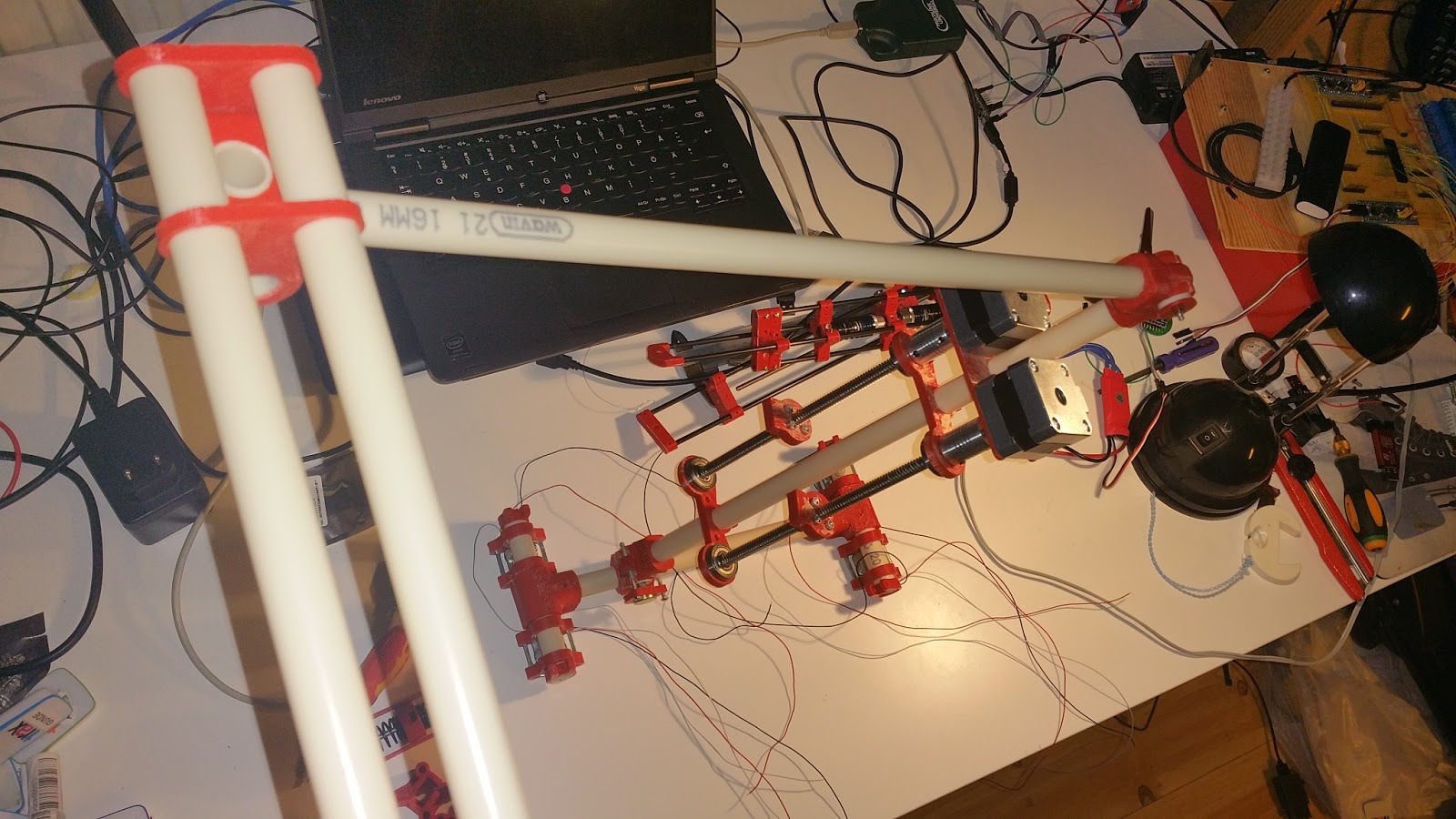
Here is a picture of my test setup, because i know you want to see it ;)

Also a comparison to prior work by me, here i use two NEMA 17 stepper motors with trapezoidal screws. The construction is heavy as hell, i think one Nema 17 stepper weighs significantly more then my entire SEA.

And here are two images of the old linear system on a "test leg".

I have no video of the new design as i managed to get a ESC with SimonK one direction firmware.
It gets boring very fast to manually reverse the rod and then drive it and then manually reverse it again.. So of cause i want to be able to actuate the motor in both directions so next entry on this blog will cover how to re-flash a SimonK ESC and i might also poke around in the FW a bit.
Todo:
- Re-flash ESC
- Make fancy video
- Add sensors to SEA
- Upload design files to github
- Make a Spring simulator
- Make a Spring generator
As always any contribution, comments and discussions are welcome!
Lets build something great together.
Part 3 is now available here.
No comments:
Post a Comment